I wrote many posts on different VHDL topics. Many of them deal with quite a complex concept.
Some days ago, I realized that I didn’t write anything “simple” dealing with the basic hardware building block.
I realized that since I received many email and telegram messages asking me to explain them some line of VHDL code. These lines are relative to a simple shift register implementation.
Sometimes what is simple for you, is not for other people!
In this post, I would like to propose three different ways of implementing a shift register in VHDL.
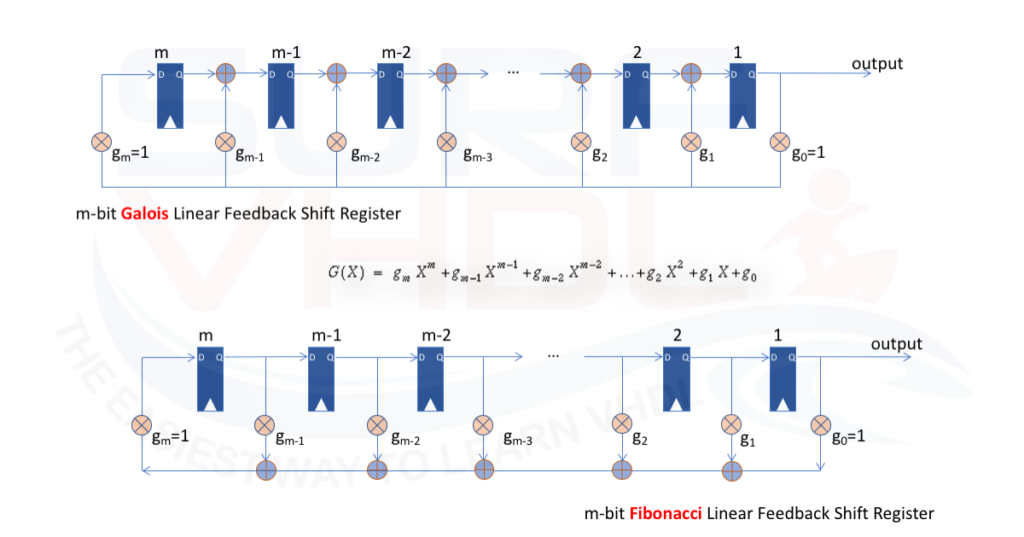
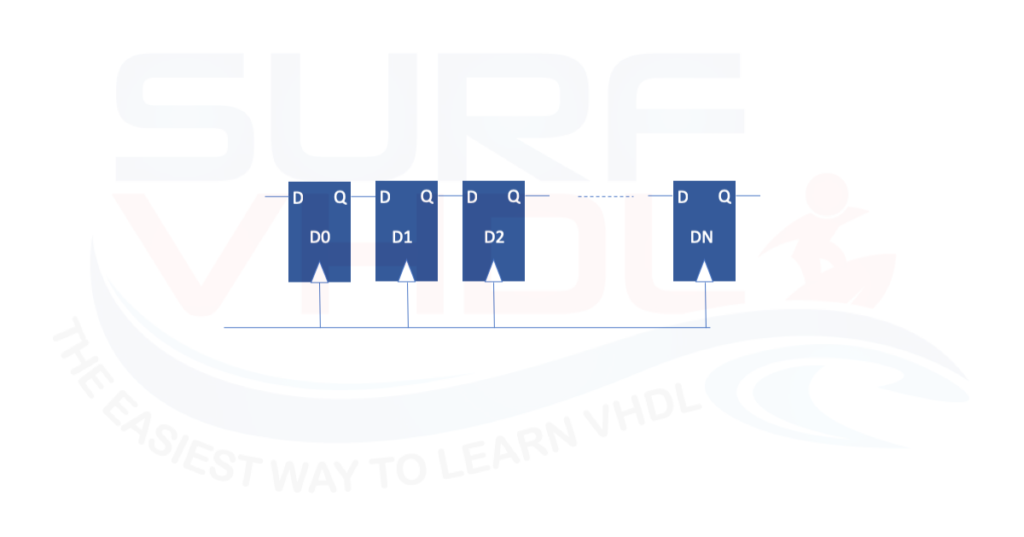
First of all, let’s review what is a shift register. It could be represented with a series of flip flop connected in series, where the output of one flip-flop is the input of the other.
In Figure 1 you can see a visual representation.
As stated before, there are at least three different ways to describe such hardware structure in VHDL. The three descriptions are totally equivalent.